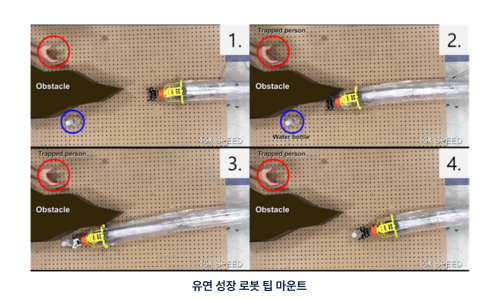
수분탐지 및 성장하는 인공뿌리 로봇 개발

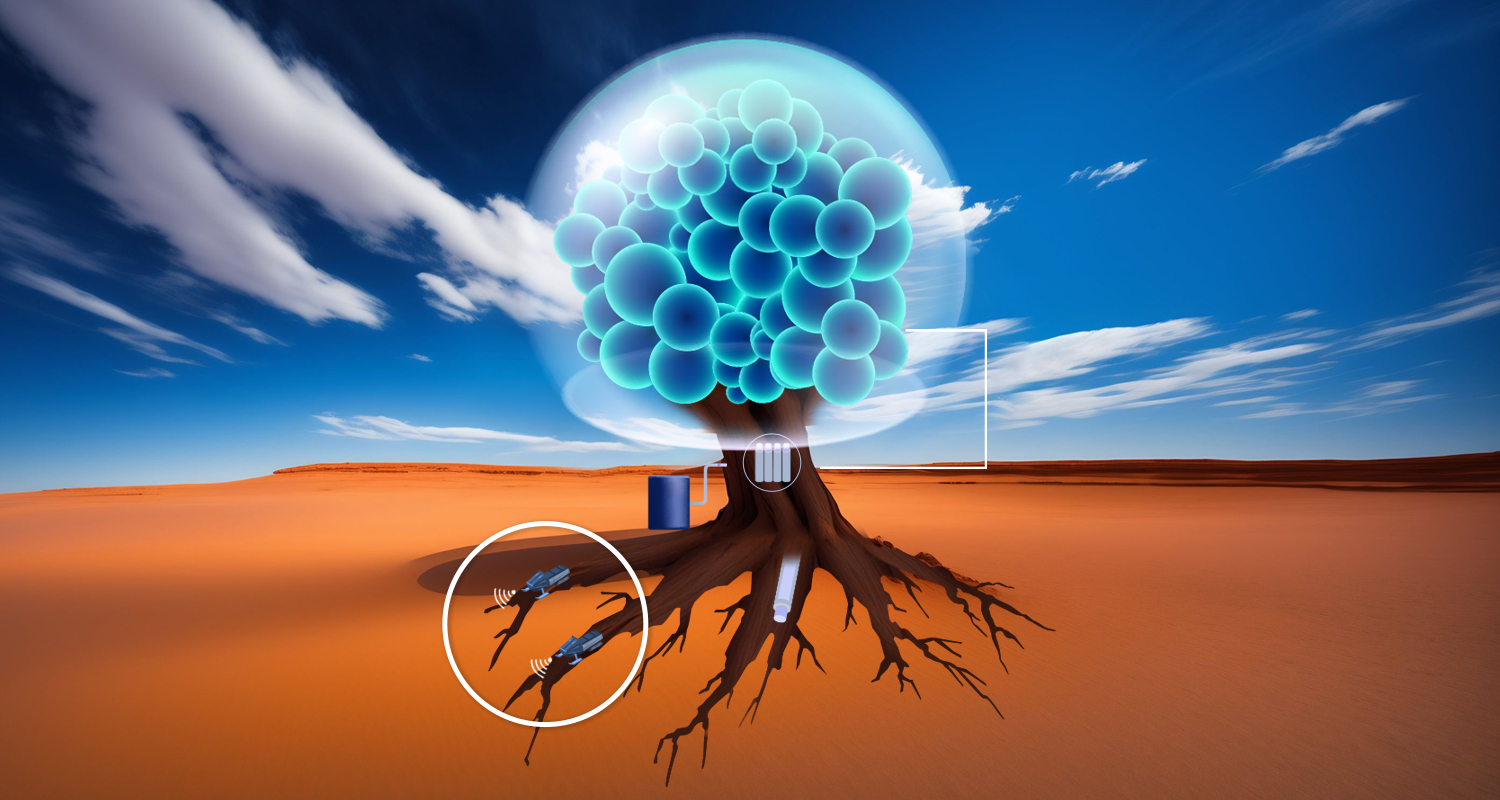
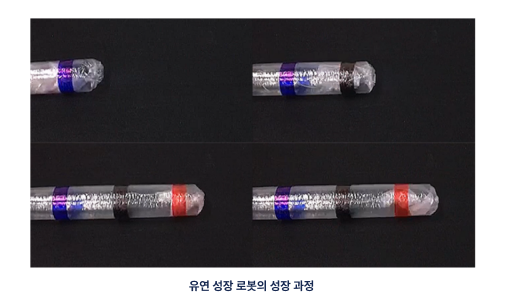
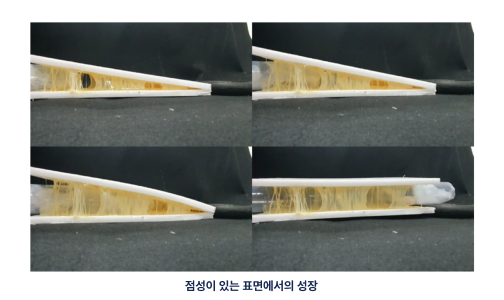
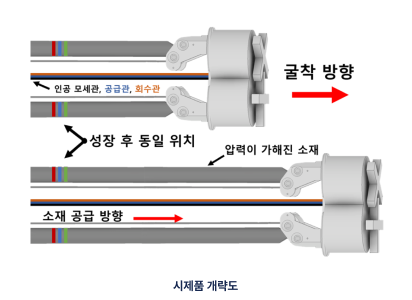
- 모사 나무뿌리 로봇 성장 장치
-
- 연구내용
-
1.
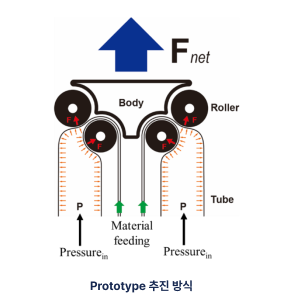
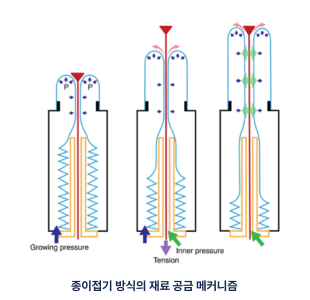
토양의 토질을 고려하여 필요한 성장 장치의 형태와 성장 시 필요한 압력 도출 및 압축기 선정
-
2.
도출된 성장 장치의 압력에서 견딜 수 있으면서 로봇이 성장하는데 사용될 수 있는 유연하고 강인한 소재 탐색
-
- 연구내용
-
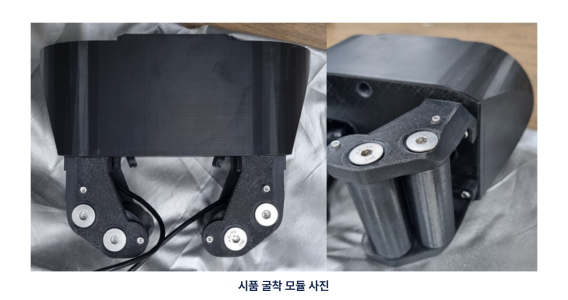
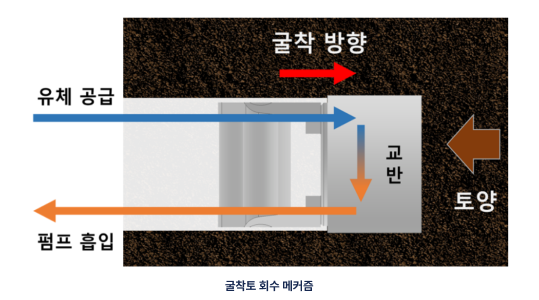
- 토양 굴착 및 회수 장치
-
- 연구내용
-
1.
목표로 하는 토양의 토질을 고려하여 적합한 굴착 장치 설계
-
2.
토양의 토질을 고려하여 굴착 면으로부터 외부로 흙을 회수할 수 있는 회수 장치의 설계 및 펌프 선정
-
- 연구내용
-
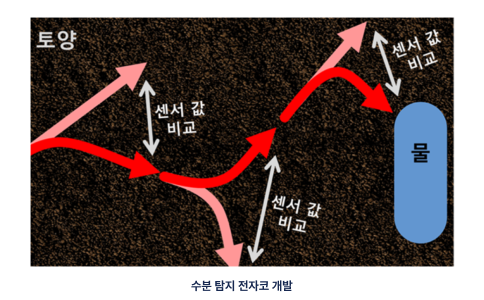
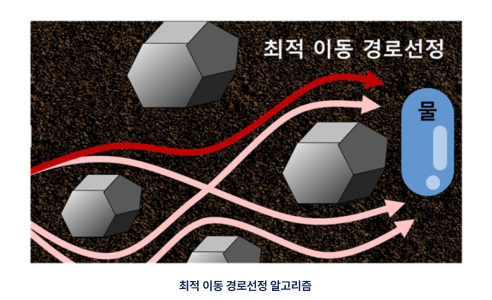
- 수분 탐지 전자코 및 최적 이동 경로 선정
-
- 연구내용
-
1.
센서 값을 비교하여 물이 있을 가능성이 높은 방향으로 굴착 방향을 결정하는 알고리즘 개발
-
2.
장애물들의 위치와 물의 위치를 고려하여 목표 위치까지의 최적 이동 경로를 선정하는 기술 개발
-
- 연구내용
-
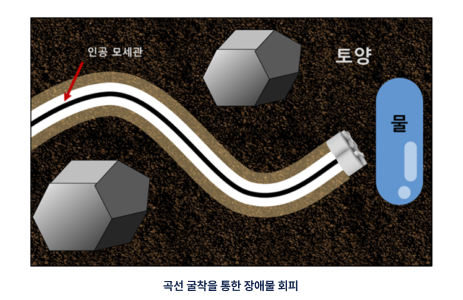
- 곡선 굴착 및 원격 제어
-
- 연구내용
-
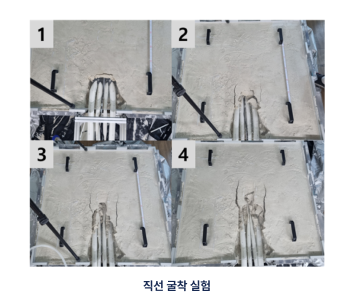
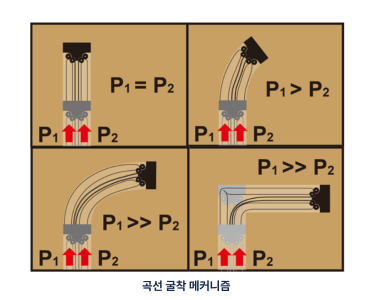
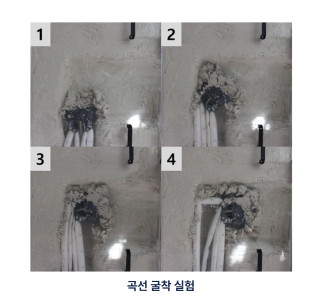
1.
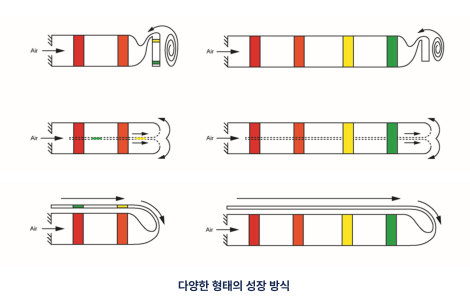
직선 굴착으로는 도달하기 어려운 위치에 존재하는 물까지 곡선 굴착을 수행하여 성장
-
2.
원격제어 상황에서도 모사 나무뿌리 로봇을 안정적으로 동작시키는 제어기술 개발
-
- 연구내용
-